Scope of application of night vision devices and their capabilities
The operating principle of night vision devices (NVDs) is based on the conversion of infrared (IR) radiation into visible radiation using an electron-optical converter (EOC) and on the amplification of low brightness levels created on the observed object by the glow of the night sky, stars and moon in visible and near IR -spectral region [1]. NVGs are widely used for surveillance, targeting and driving vehicles in both military and civilian applications. They are widely used to support the work of border, customs, and rescue services; they are used for industrial technological control, mining, scientific research, monitoring animal behavior, night navigation, astronomical observations, etc. The use of night vision devices deserves special attention. to ensure the protection and operation of security services, special forces of the Ministry of Internal Affairs, the FSB, etc. NVGs allow you to secretly provide surveillance at dusk and at night, and, if necessary, fire with high accuracy. NVGs have low cost, high reliability, small weight and dimensions, ease of use and maintenance, high performance characteristics, and significant continuous operation time. All this has led to the widespread use of night vision devices in security and safety systems.
Review of some models of night glasses
- "Dipole 203 (2+)". The Russian binocular night vision device is built according to a pseudo-binocular design and has very decent performance characteristics. The glasses have a waterproof aluminum alloy body. They are securely fastened with a system of belts on the observer’s head and allow you not to worry about the reliability of the fastenings even during active movements.
The optical capabilities of the generation 2+ converter allow you to confidently observe at a distance of up to 200 m, while the conversion results are very good even close up: wearing glasses it is quite possible to read or work with maps, documents, and drawings. Glasses can be adjusted to the vision of a particular person. The glasses are powered by regular AA batteries; one set will provide about 2.5 days of uninterrupted operation of the glasses.
- "Dipole D206 PRO (2+)". An improved and updated version of the previous device. The new case is smaller, lighter and better protected from moisture. The controls for the glasses are much better thought out, and using the device has become much more convenient - from adjusting it to the vision of a specific observer to replacing batteries. There are also additional lenses with magnification capabilities for glasses. If you purchase them and replace the standard lens of your glasses with them, you can turn them into night binoculars with magnification up to 8.25x. The glasses also received a built-in protection system that will automatically reduce the brightness of the light (for example, a lightning bolt will no longer blind the observer).
- "Yukon Tracker NV 1x24 Goggles." Compact and lightweight night vision goggles made in Belarus consist of night binoculars and a helmet-mask for mounting on the head. The plastic housing of the glasses is protected from moisture and is equipped with the patented Eclipse protective cap system. It reliably protects the optics of the device during transportation and conveniently folds back during observation without interfering with the use of glasses.
This model is equipped with an infrared illuminator with a wide illumination field, which ensures comfortable work even in extremely low light conditions. Rubber eyecups protect against glare from side flashes and prevent the glow of the device from unmasking the observer. The glasses are powered by one three-volt battery, the battery life of which is approximately 70 hours.
- “PN-14K” from the Novosibirsk Instrument-Making Plant has good optical characteristics and allows you to perform a variety of operations: conduct observation, read a map, drive a car, move over rough terrain in the light of the moon and stars. And if you turn on the infrared illuminator, then using the glasses is quite comfortable even in complete darkness. Strict acceptance to military quality standards makes these glasses very reliable. Innovative optics provide a field of view of 40 degrees, the image intensifier belongs to generation 2+.
As you can see, night vision goggles are an optical device that will be useful for hunting, fishing, hiking and many other situations.
Typical night vision devices for security and safety systems
Let's look at portable NVGs first. These include night monoculars (NM) and night vision goggles (NVG).
Night monoculars
During observation, the NM can be held in the hand or mounted on a helmet or on a special universal belt headband. At the customer's request, it is possible to attach the NM to helmets of various designs using a special universal mount.
Rice. 1. NM “Alpha-90223” and the IR illuminator “Alpha-8111-2” mounted on its body using a dovetail mount (right)
NM "Alpha-9022" (Fig. 1) [2] has a human figure recognition range (RFH) at a level of natural night illumination (NIL) equal to 3×10–3 lux (cloudless starry night), Dpac. = 200 m, field of view angle 2? = 40°, increase Г = 1? to ensure normal spatial orientation. The device produces a high-quality image, uniform across the entire field of view, thanks to the use of a 2+ or third generation image intensifier in its design. The image intensifier tube uses a microchannel amplifier, a built-in high-voltage power supply, automatic brightness control and protection from powerful light sources. To increase the range to 300 and 400 m, the monocular can be equipped with optical afocal attachments with G = 2.5? and, accordingly, Г = 4?, an adapter that allows night video and photography (Fig. 2), as well as an external IR illuminator “Alpha-8011” (Fig. 3), which can significantly improve visibility through the NM in low conditions levels of natural night light and provide vision in complete darkness at a distance of up to 150 m. When working in “complete” darkness at short distances (up to 10 m), a built-in system of local IR illumination is provided at an illumination angle of 40°. The design of the NM provides aiming within ±4 diopters and lens focusing within 0.25 m–?. This refocusing is necessary for observing both distant and nearby objects (for example, a map of the area, a repair tool, a dashboard). The supply voltage is 2.5 V, the mass of the NM is 0.35 kg, its dimensions are 115 x 70 x 40 mm. The design of the NM provides the necessary protection from dust and moisture, and salt fog.
Rice. 2. Pairing the Alfa-9022 NM with a video camera using a special adapter
The LED IR illuminator “Alpha-8111” [2] is available in two modifications: “Alpha-8111-1” and “Alpha-8111-2”. They have emission powers of 35 and 20 mW at a wavelength of 820 nm with a supply current of 250–350 mA and 160–220 mA, respectively. Their remaining parameters are identical: illumination angle 4–9°, supply voltage 3 V, dimensions ?22?120 mm, operating temperature range –40…+40 °C. The illuminator is equipped with a mount that allows quick removal and installation on night vision devices. The IR illuminator "Alpha-8011" is designed to illuminate objects observed at night with insufficient natural light: a cloudy sky in the absence of light from the moon and stars, folds of the terrain, a forest, a basement, etc.
Rice. 3. LED IR illuminator “Alpha-8111-1”
To work together with NM or NVGs, laser target designators (LTs) mounted on individual weapons (for example, a machine gun) are used. The LC is designed for targeted shooting from firearms using a head-mounted night vision device in conditions of reduced natural light at night and at dusk. The LC serves to create a light spot (illumination spot) on the target, visible in the night vision device, but practically invisible to the naked eye. LC "Alpha-7115" (Fig. 4) [2] provides a smooth change in radiation intensity up to 50 times, depending on the specific conditions for observing the target and the illumination spot. Control of operating modes and discharge of power supplies is provided by built-in LED indicators. The LC has a radiation power of 2 mW, a working wavelength of 850 nm, an angular divergence of radiation of 0.5 mrad, a supply voltage of 2.4–3 V (two AA elements), a mass of 0.31 kg, and dimensions of 120×110×42 mm. LC is designed to operate in the temperature range –40…+50 °C and relative humidity up to 98%. At the customer's request, the target designator activation button can be rigidly mounted on the mounting bracket or placed on a flexible remote cuff.
Rice. 4. Laser target designator "Alpha-7115"
The sighting universal night vision complex KPU NV "Alpha-1962" (Fig. 5) [2] is designed for targeted shooting from firearms, reading maps, driving vehicles, repair work, etc. in low light conditions at night and in twilight. The complex is indispensable for special forces security forces. The complex includes:
- NM "Alpha-9022";
- LC "Alfa-7115";
- afocal-optical attachment with G = 4?;
- IR illuminator "Alpha-8111-2";
- helmet mount;
- Charger.
Rice. 5. Night sighting system "Alpha-1962" in working position
NM "Alpha-9022" is mounted on a special headband or protective helmet. The fastening allows for quick transfer of the NM from the working position to the non-working position and vice versa. NM can be used independently of the helmet, “by hand”. In this case, it is equipped with an external IR illuminator “Alpha-8111” for vision in absolute darkness at a distance of up to 150 m, as well as an optical afocal attachment with G = 4? to increase vision range by 1.5 times. In addition, at the request of the customer, the NM can be equipped with an adapter that makes it possible to conduct night video and photography. The LC creates an IR spot of illumination, observed in the Alpha-9022 NM, but practically invisible to the naked eye. It is enough to give the weapon a position in which the illumination spot coincides with the target, and you can open fire. This allows you to fire from any position of the weapon and on the move. The charger provides charging of the batteries of the primary power supplies NM, CL and the illuminator from a voltage of 12 and 27 V, ~220 V, 50 Hz.
Rice. 6. Pseudo-binocular ONV PN-14K
Night vision goggles
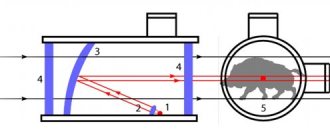
There are binocular and pseudobinocular ONVs (Table 1) [1]. Binocular NVGs consist of two identical night channels under the operator’s right and left eyes. Each channel consists of a lens, an image intensifier and an eyepiece. The ONV provides smooth adjustment of the distance between the pupils of the eyes (base of the eyes) within the range of 52–72 mm. Binocular NVGs form a stereoscopic image. This is convenient for night driving of vehicles. However, pseudobinocular NVGs are most widely used, especially to ensure safety and security. They use one lens and one image intensifier tube. From the screen of the latter, the image is displayed on both eyes using a pseudobinocular microscope. Compared to binocular ones, such NVGs have minimal weight and cost. An example of pseudobinocular ONVs is the PN-14K model (Fig. 6) [3]. If, instead of a lens with a focal length of 27 mm, a mirror-lens lens with a focal length of 100 mm is installed, then the ONV data will be converted into night binoculars (Fig. 7) [3].
Rice.
7. Pseudo-binocular ONV PN-14K with a mirror-lens lens Table 1. Characteristics of various ONVs
| Model | GN-2 | Lucie | 1PN105* | AN/GVS-21* | PN-14K** | PN-14K*** |
| Manufacturer country | Norway | France | Russia | USA | Russia | |
| 2?, deg | 40 | 50 | 45.5 (horizontal), 38 (vertical) | 40±2 (channel based on image intensifier tube); for the day channel - 165 horizontally and 90 vertically | 40 at ENO = (3–5)?10–3 lux | 10 |
| Supply voltage, V | 3 | 1,5–3,6 | 1,1–1,6 | 1,5–3,6 | 1.5 (one AA element) | |
| Diopter adjustment range | (–6)–(+2) | (–5)–(+3) | ±4 | ±4 | ||
| Ddis., m | 200 | 180 | 350 at ENO = (3–5)?10–3 lux | |||
| Magnification (G) | 1? | 3,6? | ||||
| Operating temperature range, °C | –35…+35 | |||||
| Weight, kg | 0,45 | 0,39 | 0,55 | 0,76 | 0.53 (with headband 0.77) | 0,88 |
| Dimensions, mm | 155?73?58 | 116?116?68 | 182?124?64 | 250?124?75 | ||
Note: * - low profile, ** - pseudo-binocular, *** - in the form of binoculars after replacing the lens with a focal length of 27 mm with a mirror lens with a focal length of 100 mm.
A common disadvantage of the most common traditional NVGs is their significant longitudinal dimensions. Because of them, a large overturning moment occurs. It places stress on the operator's neck and facial muscles, causing fatigue. Therefore, the efforts of developers are aimed at creating low-profile (“flat”) NVGs with a minimum longitudinal dimension. Typical representatives of these are the ONV GN-2 from Simrad (Norway) [4] and the ONV Lucie from ANGENIEUX (France) [5]. The distance from the first surface of the ONV to the pupil of the eye does not exceed 80 mm, while for traditional ONVs this dimension ranges from 135 to 200 mm. Low-profile ONV 1PN105 has been created in Russia (Fig.  [6].
[6].
Rice. 8. Low-profile ONV 1PN-105
In the USA, low-profile AN/GVS-21 NVGs have been created (Fig. 9) [7]. They are intended for special forces soldiers. Thanks to the eyepiece system, the ONVs have a low profile and, accordingly, a longitudinal dimension of no more than 80 mm. ONVs allow “end-to-end” vision due to the presence of a day channel with Г = 1?. They include a color OLED display module to which a thermal imaging image is transmitted. In this case, the observer simultaneously sees a combined image of the scene from the image intensifier screen and a thermal imaging image of the object being observed. Focusing limits 0.33 m–?, resolution 1.25 lines/mrad, eye base adjustment range 55–75 mm. A monocular version of the device is possible.
Rice. 9. Day-night NVG AN/GVS-21
Day-night binoculars
Day-night binoculars BDN-9S (Fig. 10) [7] are designed for round-the-clock visual reconnaissance of the area, detection and recognition of targets in daytime conditions and in ENO conditions. The daytime high-aperture channel BDN is built according to the classical stereoscopic scheme. The BDN night channel uses a small-sized sealed generation 2+ image intensifier tube with direct image transfer, microchannel amplification and a built-in high-voltage power supply. The brightness-enhanced image of objects on the image intensifier screen is then viewed by the observer using an optical system consisting of a projection lens, a reflector, wraparound lens systems and eyepiece units. Turning on and off the night channel BDN is done by turning the operating mode switch knob. The BDN rangefinder grid allows you to determine the distance to objects when working with both day and night channels. The characteristics of BDN-9S are given in Table 2.
Rice.
10. Day-night binoculars, model BDN-9 Table 2. Characteristics of day-night binoculars BDN-9S
| Day channel | Night channel | |
| RF detection range, m (not less) | 850 | |
| RF recognition, m (not less) | 500 | |
| Magnification (G) | 14,5? | 5? |
| 2?, deg | 4,5 | 14 |
| Power, V | 3 (two AA elements) | |
| Adjustment according to the eye base (within 56–74 mm) | rotation of eyepiece blocks | |
| Diopter adjustment | rotation of eyepiece couplings | |
| Ambient temperature range, °C | 50…+50 | |
| Relative air humidity, % (at temperature +25 °C) | up to 100 | |
| Resolution | 5» | 60» |
| Weight, kg | 1,55 | |
| Dimensions, mm | 235?168?74 | |
Active-pulse night vision devices
All of the above NVGs cannot operate in conditions of reduced atmospheric transparency (haze, fog, rain, snowfall, dust storm, etc.) or when exposed to powerful light interference (headlights of oncoming traffic, spotlight radiation, etc.).
To overcome this drawback, laser active-pulse night vision devices (APNVDs) were created. Their principle of operation is based on pulsed illumination of the observed object with radiation from a pulsed laser illuminator and pulsed control (gating) of the image intensifier tube synchronized with it [1]. AI NVDs can operate in passive (without illumination) mode, in active-continuous mode (the illuminator is working, the image intensifier is not strobed) and in the active-pulse (AI) mode (the illuminator is working, the image intensifier is strobed). The characteristics of the AI NVG models NNP-130 (“Polyus Research Institute” [9]) and “Titan 720” (“Mediton” [10]) are shown in Table 3. Externally, the AI NVGs look the same as night binoculars with an illuminator. Thanks to the high degree of protection from light interference, AI NVDs can operate even in daytime conditions (in AI mode). Table 3. Characteristics of active-pulse NVGs
| Characteristics | Model | ||
| NNP-130 | Titan 720 | ||
| Ddis., m | Passive mode | 300–400 | 500 |
| AI mode | 800 | 1000 | |
| 2?, deg | Passive mode | 8 | 15° |
| AI mode | 2?1 | 4,8?2,4 | |
| Supply voltage, V | 10–14 | 9–12 | |
| Energy consumption, W | 3,5 | 14,4 | |
| Weight, kg | 3 | 2 | |
| Dimensions, mm | 300?160?110 | 330?170?85 | |
Night vision technologies. Review.
In general, a digital night vision device consists of a lens, a light-sensitive sensor, electronic image processing and control units, a display and an eyepiece.
The power supply of digital NV devices is carried out from replaceable batteries (batteries), batteries of the same size or built-in batteries. The devices can be equipped with a connector for supplying power from external sources (for example, a car’s on-board network, compact external batteries).
To operate in low light conditions, digital night vision devices are often equipped with built-in infrared illuminators based on laser or LED sources. To improve ease of use, digital night vision devices can include a wireless control system for the main functions of the device - in this case, the user can control the device using a wireless remote control (RC).
Digital sights can be equipped with mounts for installation on weapons.
As in any optical observation device, the lens is designed to project an image onto the sensor, which, in turn, converts the light reflected from the object of observation into an electrical signal.
CCD (CCD) or CMOS (CMOS) sensors are used as a photosensitive element in digital night vision devices.
CMOS SENSOR CCD SENSOR
Typically, an electronic processing unit consists of one or several boards (depending on the layout of the device), on which specialized microcircuits are located that process the signal read from the sensor and further transmit the signal to the display, where an image of the observed object is formed. The main controls of the device are located on the boards, and the power supply circuit is also implemented, both for the device as a whole and for individual circuit circuits.
Due to the fact that microdisplays are used in digital observation devices, an eyepiece is used to observe the image, which works like a magnifying glass and allows you to comfortably view the image with magnification. Most often, digital night vision devices use translucent liquid crystal (LCD) displays (the back of the display is illuminated by a light source) or OLED displays (when an electric current is passed, the display material begins to emit light).
The use of OLED displays has a number of advantages: the ability to operate the device at lower temperatures, higher brightness and contrast of the image, a simpler and more reliable design (there is no source for backlighting the display, as in LCD displays). In addition to LCD and OLED displays, digital devices can use microdisplays made using LCOS (Liquid Crystal on Silicone) technology - a type of reflective type display.
Unlike night vision devices based on electro-optical converters (let's call them analog), digital night vision devices allow you to implement a large number of custom settings and functions. For example, adjusting the brightness and contrast of the image, changing the color of the image, entering various information into the field of view (current time, low battery indication, icons of activated modes, etc.), additional digital zoom, picture-in-picture function (allows for separate a small “window” to display in the field of view an additional image of the entire object or some part of it, including an enlarged one), temporarily turning off the display (to save energy and mask the observer by eliminating the glow of the working display).
To capture images of observed objects, video recorders can be integrated into digital night vision devices, allowing photo or video recording of information.
Digital devices can easily implement such functions as wireless (for example, WI-FI) transmission of information (photos, videos) to external remote receivers; integration with laser rangefinders (with input of information from the rangefinders into the field of view of the device), GPS sensors (the ability to record the coordinates of the observed object).
Also, the advantages of digital devices include the ability to work in daylight conditions, without fear of flashes of light and intense light sources, which can damage a night vision device based on an image intensifier tube.
The aiming mark in digital sights is usually “digital”, i.e. During video signal processing, the image of the mark is superimposed on top of the image observed on the display and moves electronically, which makes it possible to exclude from the sight mechanical units for entering corrections that are part of analog night or daytime optical sights and require high precision in the manufacture of parts and assembly of these units.
Additionally, this eliminates the effect typical of optical or analogue night sights, such as parallax, because the image of the observation object and the image of the aiming reticle are in the same plane - the display plane.
Digital sights can store in memory a large number of sighting reticles with different configurations and colors, convenient and fast zeroing using the “one-shot zeroing” or “zeroing in Freeze” functions, the function of automatically entering corrections when changing the firing distance, memorization shooting coordinates for several weapons, indication of the tilt (tilt) of the sight and much more.
BASIC PARAMETERS OF DIGITAL NIGHT VISION DEVICES
Magnification Resolution Sensitivity Angle of field of view Eye relief Power of infrared illuminator Detection and recognition range
INCREASE
The characteristic shows how many times the image of an object observed in the device is larger compared to observing the object with the naked eye.
The unit of measurement is multiple (designation “x”, for example, “2x” - “two times”).
For night devices, incl. digital, typical magnification values are from 1x to 5x, because The main task of night devices is to detect and recognize objects in low light conditions. An increase in the magnification in the NVD leads to a significant decrease in the overall aperture of the device - the image will be much darker than in a similar device with a lower magnification.
The decrease in aperture ratio with increasing magnification can be compensated by increasing the diameter of the lens, but this, in turn, will lead to an increase in the overall dimensions and weight of the device, which reduces the overall ease of use of wearable night vision devices (especially sights, the users of which additionally have to hold the weapon in their hands) .
Magnification is determined by the focal lengths of the lens and eyepiece, as well as the zoom factor (K), equal to the ratio of the physical dimensions (diagonals) of the display and sensor:
Г= (fob/f о к )*К= (fоb/f о к )*(Lд/Lс), where
fob – focal length of the lens f o k – focal length of the eyepiece Lc – sensor diagonal size Ld – display diagonal size.
Dependencies
The larger the focal length of the lens and the size of the display, the greater the magnification. The larger the focal length of the eyepiece and the size of the sensor, the lower the magnification.
1x 2x
3x 4x
RESOLUTION
Characterizes the ability of the device to depict separately two closely spaced points or lines. In the technical characteristics of the device, this parameter can be written as “resolution”, “resolution limit”, “maximum resolution”. This is, in principle, the same thing. Typically, resolution is indicated in lines per millimeter (lines per millimeter) or lines per millimeter (lin/mm, lpm in English writing), which is the same, but can also be indicated in angular units (seconds or minutes).
The higher the resolution value in strokes (lines) per millimeter and the lower the resolution in angular values, the higher the resolution. The higher the resolution of the device, the clearer the image the observer sees.
For night vision devices, it is desirable to have a resolution of at least 25 lines/mm - this resolution allows you to distinguish a human figure from an animal or other object with similar dimensions at a distance of about 100 meters.
When measuring the resolution of NVGs, special equipment is used - a collimator. The collimator allows you to create an imitation of the image of a special test object - an illuminated line target, located at a certain distance (usually 100 meters).
Line of the world
By examining the image of the test object through the device, one judges the resolution of the NVD - the smaller the strokes of the worlds can be clearly seen separately from each other, the higher the resolution.
Normal resolution Low resolution
Resolution is determined by the parameters of the optical elements of the device, sensor, display, the quality of circuit solutions implemented in the device, as well as signal processing algorithms.
The overall resolution of the device depends on the lens parameters. All other things being equal, the larger the diameter of the objective lenses, the greater its magnification and aperture ratio, and the more small details will be visible.
The resolution of the device depends on the resolution of the lens and eyepiece. The lens forms an image of the observation object in the sensor plane, and if the resolution of the lens is insufficient, further improvement of the resolution of the device is impossible. In the same way, a low-quality eyepiece can “spoil” the clearest image formed by the components of the device on the display.
The sensor parameters have a great influence on the resolution of the device. First of all, this is the sensor resolution - the number of pixels (usually indicated as the product of pixels in a period and in a column) and their size.
Addiction
The greater the number of pixels and the smaller their size, the higher the resolution. This statement is true for the same physical size of the sensors. A sensor with a higher pixel density per unit area also has a higher resolution.
Unlike black and white, the resolution of color sensors will generally be 30-40% less, which is due to a different pixel structure - one pixel of a color sensor consists of a combination of 3 subpixels, each of which registers light only from a certain part of the spectrum (respectively - red, blue, green). This is achieved through the use of color filters that transmit light of only one color. Thus, when monochrome radiation hits a pixel in a color camera, the signal will be recorded by only one subpixel, while at the same time, with a black-and-white sensor, the signal will be recorded by each pixel that the radiation hits. This is one of the reasons why the use of color sensors in night vision devices is limited and often impractical.
The resolution of the device also depends on the parameters of the display on which the image is formed. As with the sensor, the determining factor is the display resolution (number of pixels) and their size. The pixel density in the display is characterized by such an indicator as PPI (short for “pixels per inch”) - this is an indicator indicating the number of pixels per inch of area.
In the case of direct image transfer (without scaling) from the sensor to the display, the resolutions of both must be the same. In this case, a decrease in the resolution of the device (if the display resolution is lower than the sensor resolution) or the unjustified use of an expensive display (if the display resolution is higher than that of the sensor) is eliminated. If a signal is generated from the sensor in the format of a standard analog TV signal (for example, PAL format (625 lines per frame) or NTSC (525 lines per frame)), the use of sensors with a resolution higher than the resolution of the TV signal format becomes impractical .
Digital night vision devices can also use various algorithms for processing the useful signal, which can affect the overall resolution of the device. First of all, we are talking about “digital zooming,” when the image generated by the sensor is digitally processed and “transferred” to the display with some magnification. In this case, the overall resolution of the device decreases. A similar effect can be observed in digital cameras when using the “digital zoom” function.
Also, the resolution is influenced by binning (an algorithm for increasing the sensitivity of the device, which consists of summing the signals of several adjacent sensor pixels, resulting in a proportional decrease in resolution).
Along with the above factors, it is necessary to mention some more that can reduce the resolution of the device. These are various types of noise that distort the useful signal and ultimately deteriorate the image quality. The following types of noise can be distinguished:
Photon noise. It is a consequence of the discrete nature of light. Photons of light fall on the photosensitive surface of the sensor unevenly in time and not precisely in space.
Dark signal noise (snowball noise). If the lens of the device is covered with a light-proof cover, then on the display we will get “dark” frames. The main reason for this noise is thermionic electron emission (spontaneous emission of electrons as a result of heating the sensor material). The lower the temperature, the lower the dark signal, i.e. less noise.
Transfer noise. During charge transfer within the sensor, some of the electrons that make up the useful signal are lost. They are trapped on defects and impurities present in the sensor crystal material.
Reading noise. When the signal stored in a sensor pixel is output from the sensor, converted to voltage, and amplified, additional noise, called readout noise, is introduced into each element.
To combat noise in digital devices, various image processing software algorithms are used, which are often called noise reduction algorithms.
In addition to noise, the resolution can be significantly reduced by interference that occurs due to errors in the layout of the device (the relative position of printed circuit boards and connecting wires, cables inside the device) or due to errors in the routing of printed circuit boards (the relative position of conductive tracks, the presence and quality of shielding layers ). Errors in the electrical circuit of the device can cause interference: incorrect selection of radio elements for the implementation of various filters, in-circuit power supply of the electrical circuits of the device. Therefore, developing electrical circuits, writing signal processing software, and routing boards are important and complex tasks when designing digital night vision devices.
The resolution of the image generated by a digital NVG depends on the observation conditions. The higher the illumination level of the object under observation, the clearer the image we will see in the device. Based on this, we can conclude that the maximum resolution of a digital NVD will be achieved in almost daytime observation conditions or when using a powerful IR illuminator.
SENSITIVITY
To characterize the sensitivity of digital video cameras, the minimum level of illumination at the observation object is often used, at which the device is still capable of forming an image. This definition is most suitable for digital devices operating in the visible range of the spectrum. For the visible range, the unit of measurement of sensitivity is the light value - “lux”.
Since digital night vision devices are designed to operate at night, when infrared radiation predominates in the lighting, it is more correct to use energy quantities that describe the luminous flux to characterize their sensitivity.
Thus, the sensitivity indicator of digital night vision devices can be expressed as the minimum value of the power of infrared radiation that enters the input of the digital night vision device and at which it is capable of forming an image with the resolution of recognizing the object of observation (corresponding to a resolution of 25 lines/mm).
In addition, a distinction is made between the concept of spectral sensitivity - the minimum radiation power at a specific wavelength of the infrared region of the spectrum. When specifying spectral sensitivity, the wavelength of radiation at which this sensitivity value was obtained is indicated.
Unlike illumination in the visible range of the spectrum, illumination in the infrared region of the spectrum cannot be measured in lux. In this case, it is advisable to use a universal unit - watt.
The sensitivity of the device depends on the following parameters:
- Aperture and lens quality
- Sensor parameters - physical size, type and sensitivity
- Display parameters – brightness and contrast, resolution
- Signal processing algorithms
- The quality of circuit solutions implemented in the device
To obtain high sensitivity of a night vision device, it is necessary to maximally collect all photons of light arriving at the input (lens) of the device and “transfer” them to the photosensitive plane of the sensor without loss. An important role in the “transfer” process is played by the lens and its parameters such as aperture ratio, the number of lenses in the optical design, the quality of anti-reflective coatings on the surfaces of the lenses, the presence of blackening of the ends of the lenses (to eliminate light scattering inside the lens).
Dependencies
The higher the lens aperture (increases with increasing diameter of the entrance pupil and decreasing the focal length of the lens), the higher the overall sensitivity of the device. The more lenses are used in the lens, the lower the aperture ratio and, accordingly, the sensitivity of the device. The higher the light transmittance of the objective lenses, the higher the sensitivity.
The sensor is the main receiver and converter of light into an electrical signal. It is this that largely determines the sensitivity of the device. The sensitivity of the sensor depends on the size of the pixels and the density of their “packing” in the sensor. All other things being equal, the larger the pixel size, the higher the sensitivity of the sensor; the smaller the ratio of the total sensor area to the total pixel area, the higher the overall sensitivity of the sensor.
Recently, many manufacturers of cheap night vision devices use inexpensive sensors for cameras (often color), which have good sensitivity in the visible (daytime) range of the spectrum, but very low sensitivity in the infrared. At the same time, in the description of the parameters of such devices there is no information about sensitivity, but a huge number of megapixels is proudly indicated. It is easy to conclude that, despite the high resolution of the sensor, at night such a device without a powerful backlight source is not capable of forming a high-quality image, because the sensor has low sensitivity in the infrared range of the spectrum.
The second common mistake is to indicate the sensitivity of digital night vision devices in lighting engineering units of luminous flux (illuminance) - lux, and sensitivity values can reach ten-thousandths of a lux, which is significantly higher than that of night vision devices based on image intensifier tubes of generation 2+ and higher. This “hypersensitivity” can be explained in a simple way. As a rule, a lux meter is used to measure illumination, which has a spectral characteristic that matches the spectral characteristic of the human eye (see graph). Like the human eye, a lux meter is capable of recording (measuring) illumination only in the visible range of the spectrum, from 380 to 780 nm. This means that when measuring illumination at night using a lux meter, illumination values will be obtained that are close to zero, because At night there is virtually no visible radiation. But there is strong infrared radiation (see the graph of natural night illumination (NIL) of the night vault), which the lux meter is not able to register, but which is successfully “registered” by night vision devices. As an example, the figure shows graphs of the spectral sensitivity of a SONY CCD sensor and a generation 2+ image intensifier.
The spectral sensitivity indicator is used as a parameter characterizing the ability of a night vision device to operate reliably at night. Typically, it is indicated at one or more wavelengths of the spectral range. To understand the “quality” of digital night vision devices, the most optimal would be to have information on spectral sensitivity, for example, for lengths 780 ... 810 nm (average value of infrared radiation from the starry sky; sensors in this range have average sensitivity) 910 ... 940 nm (high value of infrared radiation radiation from the starry sky; invisible IR range, in which sensors are still sensitive).
By comparing the spectral sensitivity of several digital devices, we can draw certain conclusions about how they will “see” at night. Moreover, it should be remembered that the sensitivity indicator of a digital device is determined not only by the sensitivity of the sensor, but also depends on such parameters and characteristics of the device as the resolution of the lens and eyepiece, display resolution, lens aperture, quality of the sensor (lack of noise), quality of circuit solutions (lack of interference), applied signal processing algorithms.
Modern night vision devices use two main types of sensors - CCD and CMOS. The main difference between these types is the circuit design for organizing signal reading from pixels. With CCDs (charge-coupled devices), signals from each pixel are transferred sequentially to the sensor output, and then the overall signal is amplified. With CMOS, the signals from each pixel are read in parallel and amplified by “individual” amplifiers for each pixel. For this reason (the need to use part of the sensor area for a large number of amplifiers), the pixel “packing” density of CMOS sensors is lower than that of CCD sensors, and, accordingly, the sensitivity is lower. In recent years, new manufacturing technologies for CMOS sensors have appeared (such as EXMOR from SONY, BSI (Toshiba, Omnivision)), the essence of which is to increase the pixel density on the sensor area, which leads to an increase in the overall sensitivity of the sensor. The parameters of such CMOS sensors are very close to the parameters of CCD sensors, and the best samples even surpass them in certain parameters.
The display of a night vision device also affects the overall sensitivity of the device, primarily due to its resolution and brightness/contrast parameters.
It is possible to draw certain conclusions on how digital NVGs will operate in comparison with analog NVDs based on generation 2+, 3 image intensifier tubes. The sensitivity graph shows that both the CCD sensor and the photocathode of the electro-optical converter of generation 2+/3 have better sensitivity in IR is in the range of 750-850 nm and worst in the range above 900 nm.
Comparing these data with the graph of the spectral distribution of natural night illumination, we can conclude that in passive mode (without the use of additional infrared illumination), NVDs based on generation 2+ or 3 image intensifier tubes will have an advantage (higher sensitivity) at night.
An important point is that in the range above 900 nm, digital NVGs still have some sensitivity (as the wavelength increases, it decreases smoothly), while the sensitivity of NVDs on generation 2+/3 image intensifier tubes rapidly drops to zero. For this reason, night devices based on image intensifier tubes are ineffective when used with “invisible” IR illuminators (for example, 915 nm or 940 nm), while digital night vision devices are highly compatible with them. Considering that devices based on image intensifier tubes (including generation 2+) often require additional illumination when used in non-urban conditions (for example, hunting), the factor of compatibility with invisible IR illuminators is a significant advantage of digital night devices.
In the context of this topic, sensitivity is the minimum amount of infrared radiation power. Therefore, the lower its numerical value in watts, the higher it is.
For example, let's compare the measured sensitivity values of the Yukon and Pulsar night devices (see table) at a wavelength of 780 nm. The Digisight N750 device at a wavelength of 780 nm will be an order of magnitude more sensitive than the Spartan 3×42 NVD, but less sensitive than the Phantom 3×50 generation 2+ device. At a wavelength of 915 nm, the Digisight N750 will already have an advantage over the Phantom 3x50 generation 2+.
| NVG | Generation | Spectral sensitivity at 780nm, mW | Spectral sensitivity at 915nm, mW |
| Digisight N 750 | Digital | ≈2,5·10-5 | ≈1,2·10-4 |
| Phantom 3x50 | II+ | ≈1,5·10-5 | ≈5·10-4 |
| Spartan 3x42 | I | ≈25·10-5 | ≈8000·10-4 |
| Spartan 4x50 | I | ≈15·10-5 | ≈2500·10-4 |
LINE OF SIGHT
Characterizes the size of the space that can simultaneously be viewed through the device. Typically, the field of view in the parameters of devices is indicated in degrees (the angle of the field of view in the figure below is designated as 2Ѡ) or in meters for a specific distance (L) to the object of observation (the linear field of view in the figure is designated as A).
The field of view of digital night vision devices is determined by the focus of the lens ( fob ) and the physical size of the sensor (B). Typically, the width (horizontal size) is taken as the size of the sensor when calculating the field of view, resulting in the horizontal angular field of view:
2Ѡ=2*arctg((B/(2* fob))
Knowing the size of the sensor vertically (height) and diagonally, you can also calculate the angular field of view of the device vertically or diagonally.
Addiction:
The larger the sensor size or the smaller the lens focus, the larger the field of view. The larger the field of view of the device, the more comfortable it is to observe objects - there is no need to constantly move the device to view the part of space of interest.
It is important to understand that the field of view is inversely proportional to magnification - as the magnification of the device increases, its field of view decreases. At the same time, with an increase in the field of view, the detection and recognition distance will decrease, because, firstly, the magnification will decrease, and secondly, when using IR illuminators, for comfortable observation an IR illuminator with a large radiation divergence angle will be required ( should approximately correspond to the angle of the field of view of the device), which in turn will lead to a decrease in illumination over the area, and accordingly to a decrease in the illumination range of the IR illuminator.
You can familiarize yourself with the new models of PULSAR thermal imagers and make an informed choice here.
Main results and conclusions
Based on the above, it can be argued that currently there are quite effective NVGs for safety and security purposes. With their help, it is possible to ensure even round-the-clock operation, and in the case of using AI NVDs, also operation with reduced atmospheric transparency. This allows you to reliably provide protection from intruders in a wide range of changes in external conditions. The use of such NVGs is advisable for both security workers and special forces soldiers solving complex combat missions in limited visibility conditions.
Possible prospects for improvement
Currently, image intensifier photocathodes operate in the spectral region of 0.4–0.9 µm. However, the shift of the working spectrum region to the IR range (1.4–1.8 µm) opens up new opportunities for NVDs. The average ENO value on a moonless night for the spectral region of 0.4–0.9 μm reaches (1.5–3)?10–9 W/cm2, and in the spectral region of 1.4–1.8 μm - (1.5 –2) ?10–7 W/cm2, i.e. two orders of magnitude higher. In addition to this, the transparency of the atmosphere improves: with a meteorological visibility range of 10 km, the transmittance of a 1 km thick atmosphere at a wavelength of 0.6 μm is 0.72, and in the center of the spectral region 1.4–1.8 μm is 0.93. In this case, the brightness of the atmospheric haze decreases by more than an order of magnitude in the spectral region of 1.4–1.8 μm compared to the visible region of the spectrum. The contrast value between the observed object and the background in this IR spectral region is more stable and is 1.4–1.5 times higher than in the 0.4–0.9 μm spectral region. In addition, if in this region of the spectrum the ENO varies from 10–5 to 2.5?10–9 W/cm2, then in the region of 1.4–1.8 microns - from 1.6?10–4 to (3– 4)? 10–7 W/cm2 under the same EHO conditions, i.e., by almost two orders of magnitude. The percentage of illumination throughout the year for ENO in the range of 5×10–3–5×10–4 lux for the spectral region of 1.4–1.8 μm is also almost twice as high as for 0.4–0.9 μm [ 1]. In the spectral region of 1.4–1.8 µm it is possible to work in fog, to a certain extent in some smoke and dust, and also to visualize the radiation of modern laser target designators and rangefinders operating at wavelengths of 1.55 µm and 1.7 µm . The use of night vision devices operating in the spectral range of 1.4–2.0 µm is very effective for unmasking objects: the difference in the reflectivity of uniforms allows in the spectral range of 1.4–2.0 µm not only to detect a soldier against a background of greenery, but also to distinguish one's own from someone else's. It is known that camouflage allows you to camouflage various objects against the background of the surrounding space. However, camouflage designed for the visible spectrum may not be effective in the spectral region of 1.4–1.8 µm. For her, the camouflage pattern disappears, and the silhouette of a camouflaged object is revealed [1].
Another promising direction for improving NVGs is the use of 3D printing for their production [11]. Based on it, it is possible to create microminiature laser target designators, IR illuminators, as well as solid-state image converters instead of traditional image intensifier tubes. For NVDs, the use of 3D printing will make it possible to create ultra-miniature electronic circuits with high performance, as well as primary power supplies in an integrated design. In turn, this will lead to a reduction in the weight, dimensions and energy consumption of NVGs, as well as to an increase in their reliability. The level of development of 3D printing achieved recently allows us to count on further improvement of NVGs in the coming years.
Literature
- Geykhman I. L., Volkov V. G. Vision and security. M.: News. 2009.
- Special observation devices for disaster prevention and emergency rescue operations. M.: JSC "Shvabe-Fotopribor". 2014.
- Night-vision devices. Catalog. Novosibirsk: JSC Shvabe Defense and Protection. 2014.
- Night Vision Goggles GN-2, GN-3. Simrad Optronics brochure. Norway. 2004.
- Night Vision Goggles Lucie. Prospectus of ANGENIEUX SA France. 2004.
- Catalog of products for special and civil applications. JSC ROMZ. Rostov the Great. 2012.
- Hewish M. Image in everthing // Jane's International Defense New. 1999.
- Day-night binoculars BDN-9S. Prospect of JSC ZOMZ. Moscow region, Sergiev Posad. 2014.
- Active-pulse night vision device M.: Prospect of JSC Research Institute Polyus. 2002.
- Active-pulse night vision device. M.: Prospect of JSC "Mediton". 2002.
- Professional 3D printers. www.3d.globatek.ru